
 技術參數
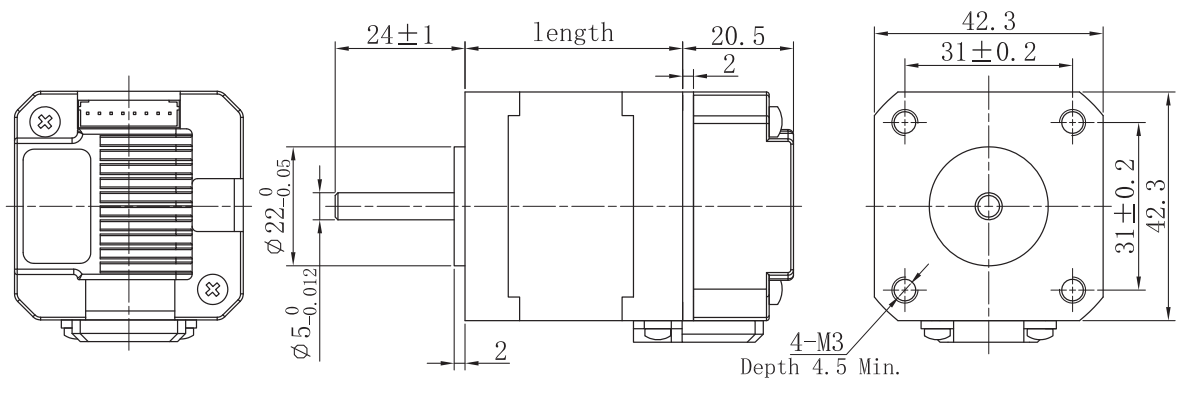
技術參數 外(wài)形尺寸
外(wài)形尺寸 資(zī)料下(xià)載
資(zī)料下(xià)載 聯系合作
聯系合作項目(Item) | 說明Specifications) |
步距角(Step Angle) | 1.8。 |
步距角精度(Step Angle Accuracy) | ±5% (整步,空載)(full step ,no load) |
徑向間隙(Shaft Radial Play) | 0.02mm@450 g-load |
軸向間隙(Shaft Axial Play) | 0.08mm@450 g-load |
最大(dà)徑向負載(Max. radial force) | 28N 距法蘭20mm (20mm from the flange) |
最大(dà)軸向負載(Max. axial force) | 10N |
介電強度(Dielectric Strength) | 600VAC /1s |
絕緣電阻(Insulation Resistance) | 100MΩ ,500VDC |
環境溫度(Ambient Temperature) | -20。C~+50。C |
絕緣等級(Insulation Class) | Class B |
型号(Model No.) | Current /Phase 每相 電流 | Resistance /Phase 每相 電阻 | Inductance /Phase 每相 電感 | Holding Torque 保持 轉矩 | Detent Torque 定位 轉矩 | # of Leads 引出線數 | Rotor Inertia 轉動慣量 | Weight 重量 | Length 機身 長度 |
單出軸 (Single SHAFT) | A | Ω | mH | N.m | N.m | # | g-cm2 | kg | mm |
FL42STH33-1334A-IE2 | 1.33 | 2.1 | 2.5 | 0.22 | 0.012 | 4 | 35 | 0.22 | 33.5±1 |
FL42STH38-1684A-IE4 | 1.68 | 1.65 | 3.2 | 0.36 | 0.015 | 4 | 54 | 0.28 | 39.5±1 |
FL42STH47-1684A-IE4 | 1.68 | 1.65 | 2.8 | 0.44 | 0.02 | 4 | 68 | 0.35 | 47.5±1 |
說明(Specifications) | 最小(xiǎo)值(Min.) | 典型值(Typ.) | 最大(dà)值(Max.) | 單位(Unit) |
輸入電壓(直流)/ Input voltage (DC) | 12 | 24 | 32 | Vdc |
輸出電流(峰值)/ Output current (peak) | 0.5 | - | 2.2 | A |
步進脈沖頻(pín)率/ Step pulse frequency | 0 | - | 200 | KHz |
脈沖電壓/ Pulse voltage | - | 5 | 5 | Vdc |
控制信号輸入電流/ Control signal input current | 7 | 10 | 16 | mA |
絕緣電阻/ Insulation resistance | 100 | - | - | MΩ |
細分(fēn) | 2 | 4 | 8 | 16 | 20 | 25 | 32 | 64 |
PU/Rev | 400 | 800 | 1600 | 3200 | 4000 | 5000 | 6400 | 12800 |
SW6 | ON | ON | ON | ON | OFF | OFF | OFF | OFF |
SW5 | ON | ON | OFF | OFF | ON | ON | OFF | OFF |
SW4 | ON | OFF | ON | OFF | ON | OFF | ON | OFF |
電流Peak | 0.5A | 0.7A | 1.0A | 1.2A | 1.5A | 1.8A | 2.0A | 2.2A |
電流RMS | 0.35A | 0.5A | 0.7A | 0.85A | 1.0A | 1.28A | 1.42A | 1.58A |
SW3 | ON | ON | ON | ON | OFF | OFF | OFF | OFF |
SW2 | ON | ON | OFF | OFF | ON | ON | OFF | OFF |
SW1 | ON | OFF | ON | OFF | ON | OFF | ON | OFF |
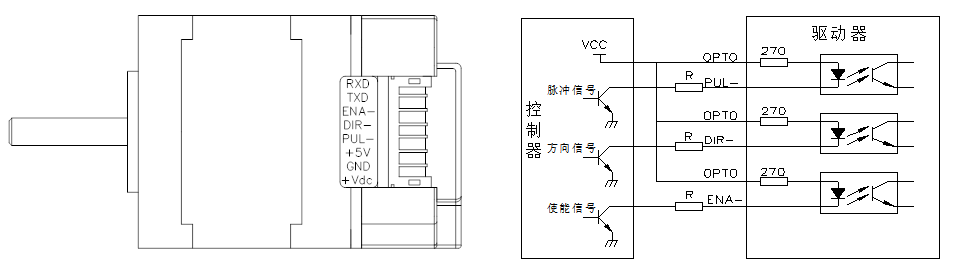
引腳說明 (Pin description) | 功能(Function) |
+Vdc | 電源電壓:12~32 Vdc,包括電壓波動和EMF電壓。 Power supply:12~32 Vdc, Including voltage fluctuation and EMF voltage. |
GND | 接地(Power Ground) |
OPTO+(+5V) | 脈沖控制信号:脈沖上升沿有效;PUL-高電平時4~5V,低電平時0~0.5V。爲了可靠響應脈沖信号,脈沖寬度應大(dà)于2.5如采用+12V或+24V時需串電阻。 Pulse control signal: pulse rising edge is valid; PUL-high level is 4~5V, low level is 0~0.5V. In order to respond reliably to pulse signals, the pulse width should be greater than 2.5. If +12V or +24V is used, string resistance is required. |
PUL- | |
OPTO+(+5V) | 方向信号:高/低電平信号,爲保證電機可靠換向,方向信号應先于脈沖信号至少 5μs建立。電機的初始運行方向與電機的接線有關,互換任一(yī)相繞組(如A+、A-交換)可以改變電機初始運行的方向,DIR-高電平時4~5V,低電平時0~0.5V。 Direction signal: High/low level signal. To ensure reliable commutation of the motor, the direction signal should be established before the pulse signal is at least 5μs. The initial running direction of the motor is related to the wiring of the motor. Interchanging any phase winding (such as A+, A-exchange) can change the direction of the initial running of the motor, DIR-high level 4~5V, low level 0~0.5V. |
DIR- | |
OPTO+(+5V) | 使能信号:此輸入信号用于使能或禁止。ENA+ 接+5V,ENA-接低電平(或内部光耦導通)時,驅動器将切斷電機各相的電流使電機處于自由狀态,此時步進脈沖不被響應。當不需用此功能時,使能信号端懸空即可。 Enable signal: This input signal is used to enable or disable. When ENA+ is connected to +5V and ENA- is connected to low level (or internal optocoupler is on), the driver will cut off the current of each phase of the motor to make the motor free, and the step pulse will not be responded. When this function is not needed, the enable signal is left floating. |
ENA-(ENA) | |
TXD | RS232 transmit |
RXD | RS232 receive |
該款電機可以根據客戶需求定制。
The motor can be designed &manufactured with customized request.

關注抖音官方号

關注微信視頻(pín)号

關注微信公衆号

咨詢熱線
+86-519-85132957
聯系郵箱
info@fullingmotor.com
公司地址
江蘇省常州市新北(běi)區昆侖路69号Copyright 2023 版權所有 常州億速機電有限公司










